Understanding Normalizing Flows
1. 提出问题
目前主流的深度生成模型(deep generative model)有:
- VAE
- GANs
这两种技术都可以解决密度估计(density estimation)问题,也就是找出数据\(X\)的分布。对于数据\(X=\{x_1, x_2, \cdots, x_n\}\),假设它是某个随机分布抽取出来的样本。如果我们能得到这个随机分布的话,就可以无限制地生成样本。但这个分布是难以获得的,必须用已有的数据通过训练得到或逼近它。
为了达到上述目的,首先选择一个已知的随机分布(例如高斯分布)\(Z \sim N(\mu, \sigma^2)\),以上两种技术学习参数去将已知分布\(Z\)映射/转移到数据\(X\)的未知分布中。一旦参数学习完毕,我们就能够通过已知的概率分布中的数据,找到数据分布中对应的数据,以达到生成的目的。
那么VAE和GANs有什么不足的地方?它们学习到的是分布的隐式表达,无法获得数据\(X\)分布的确切表达。换句话说,你给我任意从高斯分布采样的数据\(z\),我不仅能找到它在数据\(X\)分布中的映射,还能计算出密度\(p(z)\);但是给我任意一个数据\(x\),VAE和GANs不能给出密度\(q(x)\)。
Normalizing flows(NF)也叫标准化流,就是为解决这个问题而诞生的。
我们要做的事情框架为:
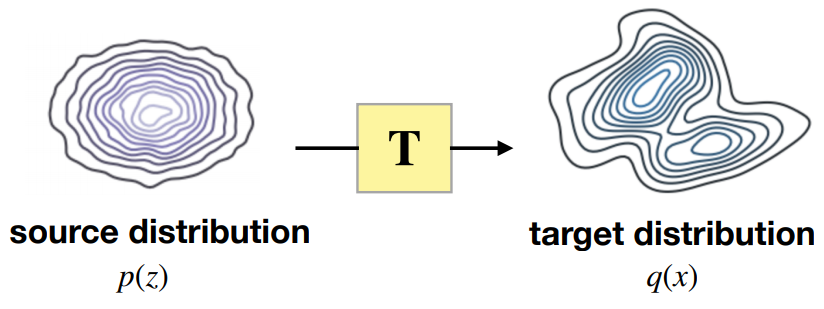
输入已知概率分布(source distribution),经过Transformation,得到目标概率分布(target distribution)。
2. 初步理解
2.1 单变量的映射
对于单变量的映射:\(T:Z\rightarrow X\)
![]()
如上图,考虑一个变量\(z\)服从均匀分布\(Uniform(0,1)\),经过一个简单的线性映射\(T\)(\(x=3z+1\))后到了新的分布中。由于累积密度的性质,映射前和映射后的分布所占的面积是相等的,所以有: \(\begin{aligned} p(z)dz &= q(x)dx \\ q(x) &= p(z)|\frac{dz}{dx}| \\ q(x) &= p(z)|\frac{\partial{T(z)}}{\partial{z}}|^{-1} \end{aligned} \tag{1}\)
2.2 多变量的映射
对于多变量的映射:\(T:\mathbb{R}^d\rightarrow \mathbb{R}^d\)
已知\(\vec x \subseteq \mathbb{R}^d\),\(\vec z \subseteq \mathbb{R}^d\),\(\vec x = (x_1, x_2, \cdots, x_d)\),\(\vec z = (z_1, z_2, \cdots, z_d)\)。
\(T: \vec z \rightarrow \vec x\),\(T = (T_1, T_2, \cdots, T_d)\)
于是有:
\[x_1 = T_1(\vec z) = T_1(z_1, z_2, \cdots, z_d) \\ x_2 = T_2(\vec z) = T_2(z_1, z_2, \cdots, z_d) \\ \cdots \\ x_d = T_d(\vec z) = T_d(z_1, z_2, \cdots, z_d)\]所以: \(q(\vec x) = p(\vec z)|det(\nabla_{\vec z}T(\vec z))|^{-1} \tag{2}\)
其中:
\[\nabla_{\vec z}T(\vec z)) = \left[ \begin{matrix} \frac{\partial{T_1}}{\partial{z_1}} & \frac{\partial{T_1}}{\partial{z_2}} & \cdots &\frac{\partial{T_1}}{\partial{z_d}} \\ \frac{\partial{T_2}}{\partial{z_1}} & \frac{\partial{T_2}}{\partial{z_2}} & \cdots &\frac{\partial{T_2}}{\partial{z_d}} \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial{T_d}}{\partial{z_1}} & \frac{\partial{T_d}}{\partial{z_2}} & \cdots &\frac{\partial{T_d}}{\partial{z_d}} \\ \end{matrix} \right]\]这也被称为雅可比矩阵(Jacobian matrix)。式\((2)\)是NF的核心。
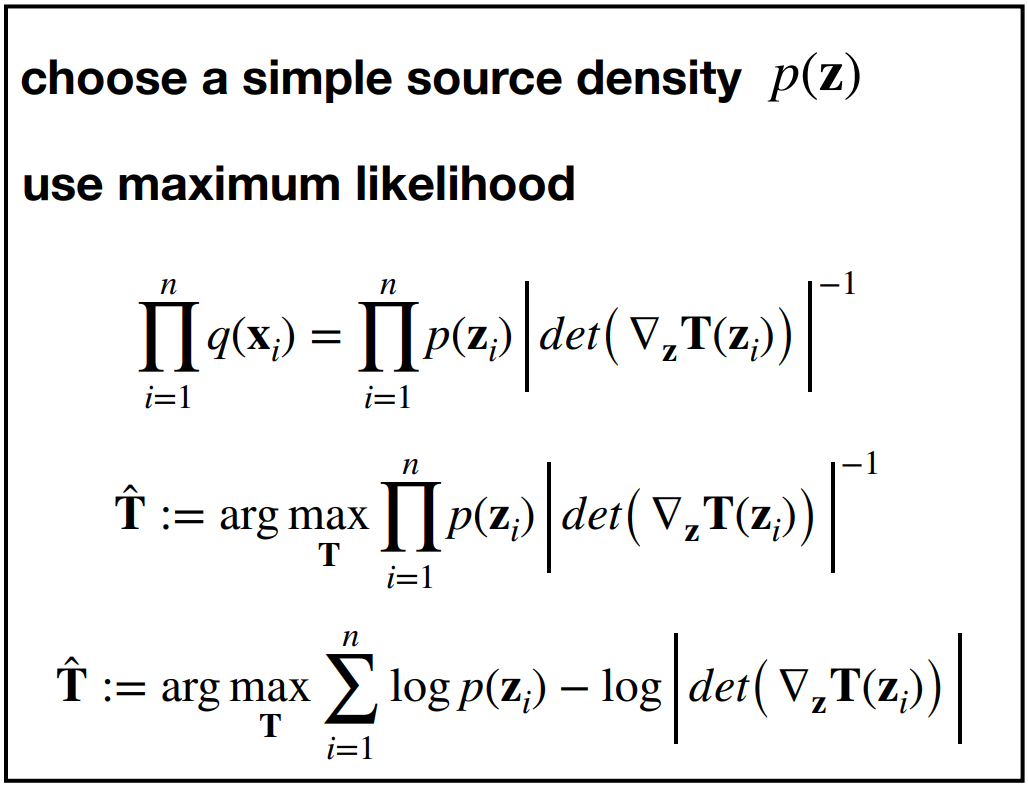
3. 学习流程
给定一个数据集\(D = \{x_1, x_2, x_3, \cdots, x_n\} \sim q(x)\),我们要学习出密度函数\(q(x)\),本质上就是学习转换函数\(T\)的参数,既然“模型已定,参数未知”,则使用最大似然估计:
理论上来说是按照上面的学习流程:最大似然估计,但是现在又遇到问题了!
- \(z_i\)怎么获得?\(z_i = T^{-1}(x_i)\),要通过\(T^{-1}\)才能获得;
- 雅可比行列式的计算量太大。
解决方案:
-
对于第一个问题,必须要求换转函数\(T\)是可逆的;
-
对于第二个问题,令\(T\)变为“三角形状”的映射(increasing triangular maps):
经过这种设定,雅可比矩阵就变为:
\[\nabla_{\vec z}T(\vec z)) = \left[ \begin{matrix} \frac{\partial{T_1}}{\partial{z_1}} & 0 & \cdots & 0 \\ \frac{\partial{T_2}}{\partial{z_1}} & \frac{\partial{T_2}}{\partial{z_2}} & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial{T_d}}{\partial{z_1}} & \frac{\partial{T_d}}{\partial{z_2}} & \cdots &\frac{\partial{T_d}}{\partial{z_d}} \\ \end{matrix} \right]\]在计算行列式时只需要将对角线的值相乘即可,大大减少计算量。
4. 标准化流
NF的研究就是“研究如何建立满足上述条件的转换函数\(T\),并训练他们获得目标数据的分布”。
整体的学习框架如下图:
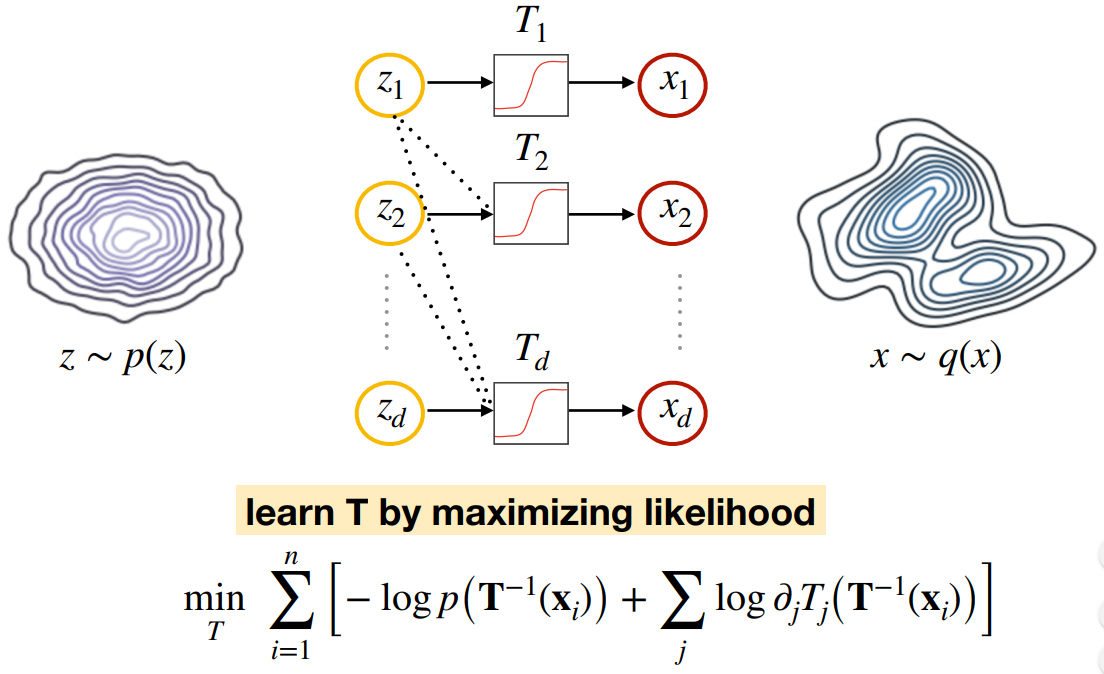
如果能够获得这样的转换函数\(T\),那么就能够通过式\((2)\)计算出\(q(x)\),问题得到解决。
那么为什么称为“Flows”呢?因为转换函数\(T\)可以叠加很多层,多层叠加可形成“流式”结构。
\[q(x) = q(z)|det \frac{\partial f^{-1}}{\partial x}| = q(z)|det \frac{\partial f}{\partial z}|^{-1} \tag{3}\] \[z_K = f_K \circ f_{K-1} \circ \cdots \circ f_2 \circ f_1(z_0)\] \[lnq_K(z_K) = ln q_0(z_0) - \sum_{k=1}^K ln|det \frac{\partial f_k}{\partial z_{k-1}}|\]式\((3)\)也叫做Change of variable formula。
下面是用PyTorch实现的标准化流的简单教程:
Tutorial of normalizing flows with PyTorch: normalizing-flows-tutorial-pytorch
参考
cs480-lecture23 (Source of the images on this page)